Autonomous 360 Photo Capture Drone
This was a very challenging and fun project. From a drone design perspective it was a great exercise in balancing customer requirements with achievable internal mechanical system architectures. I learned a lot about composite material manufacturing, MJF 3D printing limits, maximizing propulsion efficiency and designing with multisensory field of views in mind.



There is an incredible amount of compute, cameras, sensors and wires inside this little drone. I experimented in CAD with a few different mechanical arrangements but quite liked this hammerhead style optics-forward design for this specific drone.

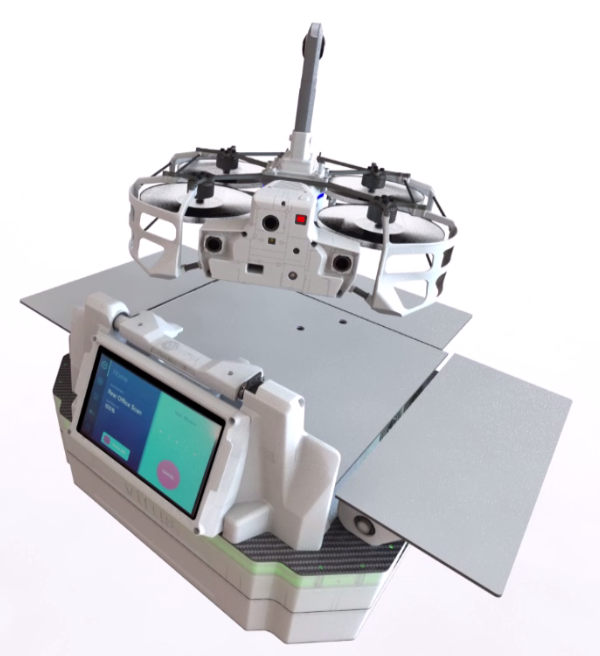
This is the charging base station I designed for the drone. It automatically centers the drone and aligns the charging pins to engage. I explored wireless charging but you can get much faster charge rates through high pressure contact charging pins, which is important for maximizing robot mission time in the air. The alignment flaps center he drone to within a cubic millimeter every time it lands, which is far more margin than required for simple charging pin alignment, but opens up a lot of potential for future precision payload exchange applications.

Here for example, the simple flap design aligns the drone precisely, allowing for reliable battery payload exchange. In other instances it can exchange packages or tools.

I wanted the base station to be compatible with different sized multirotors. All you would need to attach is a universal landing skeg to the bottom with integrated charge pins.

Here’s the modular drone without the propulsion body attached on top.



Here’s a short video of this drone in action taking 360 photos autonomously
Here is an early prototype doing an autonomous multi-waypoint reconnaissance mission
A short video with detailed view of mechanical drone design